/*
Disclaimers: The author is not responsible for any misuse of the information contained herein and accepts no responsibility
for any damage caused by the use or misuse of this information.
Credits: This code has been taken from http://www.arduino.cc/en/Tutorial/Debounce and modified for Spot Welding purpose.
*/
int Allow_execution = LOW;
const int buttonPin = 3;
const int RelayPin = 10;
int RelayState = LOW;
int buttonState;
int lastButtonState = LOW;
int delayontime = 0;
unsigned long lastDebounceTime = 500;
unsigned long debounceDelay = 200;
int period = 40; /** 40ms, changing this will keep the output ON for that many milliseconds */
unsigned long time_now = 0;
void setup() {
Serial.begin(9600);
pinMode(buttonPin, INPUT_PULLUP);
pinMode(RelayPin, OUTPUT);
digitalWrite(RelayPin, RelayState);
delay(500);
if(digitalRead(buttonPin) == HIGH)
{
Allow_execution = HIGH;
}
}
void loop() {
if(Allow_execution == HIGH)
{
int reading = digitalRead(buttonPin);
if (reading != lastButtonState) {
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
if (reading != buttonState) {
buttonState = reading;
if (buttonState == LOW) {
RelayState = HIGH;
time_now = millis();
delayontime = millis();
}
}
}
digitalWrite(RelayPin, RelayState);
if(RelayState == HIGH)
{
if(millis() > time_now + period)
{
RelayState = LOW;
delayontime = millis() - delayontime;
Serial.print(delayontime);
}
}
lastButtonState = reading;
}
}
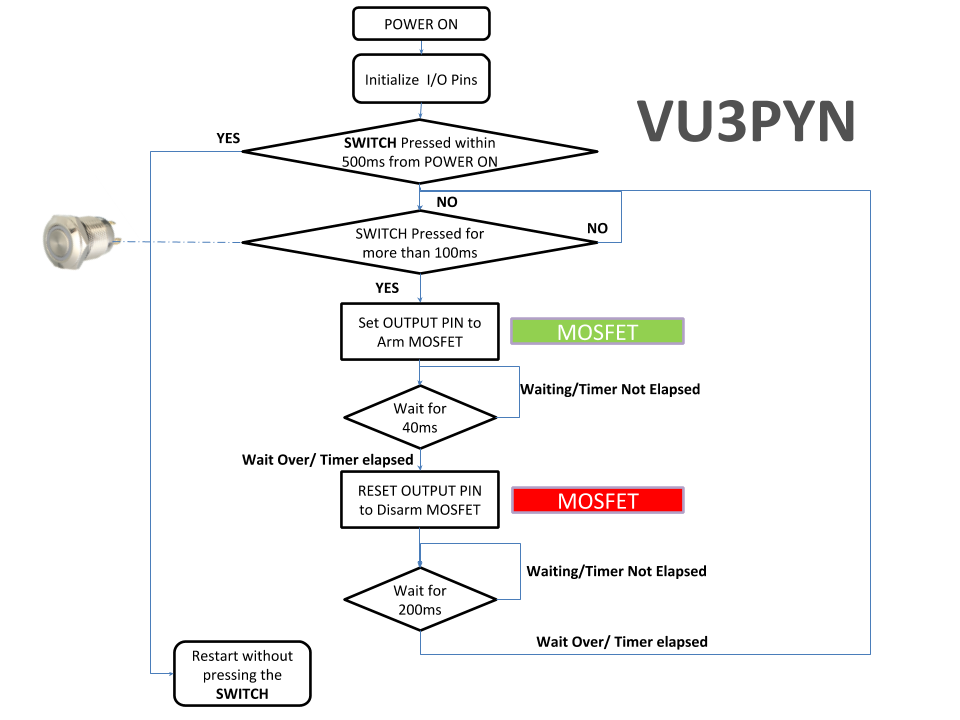
Functional Flow for Spot Welder – millisecond delay